[Nature Communications] Finger-Inspired Rigid-Soft Hybrid Tactile Sensor with Superior Sensitivity at High Frequency
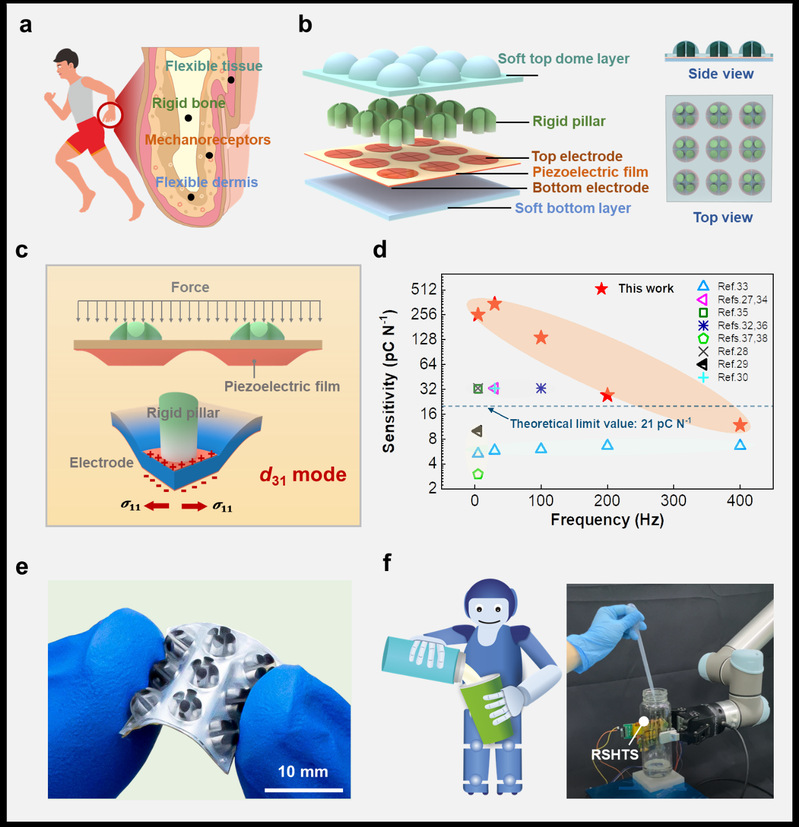
Abstract: Among kinds of flexible tactile sensors, piezoelectric tactile sensor has the advantage of fast response for dynamic force detection. However, it suffers from low sensitivity at high-frequency dynamic stimuli. Here, inspired by finger structure—rigid skeleton embedded in muscle, we report a piezoelectric tactile sensor using a rigid-soft hybrid force-transmission-layer in combination with a soft bottom substrate, which not only greatly enhances the force transmission, but also triggers a significantly magnified effect in d31 working mode of the piezoelectric sensory layer, instead of conventional d33 mode. Experiments show that this sensor exhibits a super-high sensitivity of 346.5 pC N−1 (@ 30 Hz), wide bandwidth of 5–600 Hz and a linear force detection range of 0.009–4.3 N, which is ~17 times the theoretical sensitivity of d33 mode. Furthermore, the sensor is able to detect multiple force directions with high reliability, and shows great potential in robotic dynamic tactile sensing.
Link: https://www.nature.com/articles/s41467-022-32827-7